





Institut für Industrielle Fertigung und Farbrikbetrieb
Gelähmte Hand kann mit Exoskelett wieder greifen
Mit einem am IFF neu entwickelten Hand-Exoskelett können Patienten ihre gelähmte Hand wieder bewegen. Das von der Baden-Württemberg Stiftung unterstützte Projekt von Jonathan Eckstein wird nach der Patenterteilung im Dezember 2018 nun von der Technologie-Lizenz Büro GmbH in Karlsruhe vermarktet.
Text: Annette Siller, TLB Karlsruhe
Greifen, Halten, Öffnen und Schließen – die Funktionen einer menschlichen Hand sind ein komplexes Zusammenspiel aus Muskeln, Knochen und Nervenfasern. Durch Erkrankungen wie Muskelschwäche, Spastik oder motorische Defizite kann die Funktionalität der Hand gestört sein. An der Universität Stuttgart wurde nun ein Hand-Exoskelett entwickelt, mit welchem die Greif-Fähigkeit einer gelähmten Hand wiederhergestellt werden kann.
Nach Hirn- oder Rückenmarksverletzungen können Beeinträchtigungen wie Verlust der Muskelkraft, Apraxien oder Ataxien, Spastik oder Lähmungen der Hand auftreten. Durch die Einschränkungen im beruflichen und privaten Bereich ist dies für die Betroffenen ein großer Verlust an Lebensqualität.
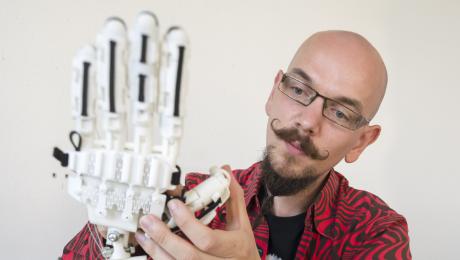
Forscher des Instituts für Industrielle Fertigung und Fabrikbetrieb (IFF) der Universität Stuttgart haben nun ein Hand-Exoskelett entwickelt, das aus einem zentralen Montagemodul sowie einzelnen, beweglichen Fingermodulen besteht. Im Vergleich zu bereits bestehenden Hand-Exoskeletten hat das in Stuttgart entwickelte Modell entscheidende Vorteile: Zum einen können die Module individuell für jeden Patienten ausgestaltet und vor allem die Fingermodule sehr flexibel gestaltet werden. Damit erhält der Patient auch die Möglichkeit, seine Hand zu spreizen und seitlich zu bewegen und einzelne Finger zu bewegen.
Zum anderen ist durch diese Art der Ausgestaltung das Exoskelett leichter zu handhaben und die Patienten können es selbstständig anlegen. Durch das offene Schalensystem können die Patienten sich die Module einzeln an die Hand anstecken, wie Erfinder Jonathan Eckstein erläutert, der als wissenschaftlicher Mitarbeiter im Bereich Antriebssysteme und Exoskelette am IFF arbeitet. Die einzelnen Module werden angesteckt und können dann per Motor gestreckt oder gebeugt werden.
Das neu entwickelte Hand-Exoskelett wird aus einem speziellen Kunststoff hergestellt. Dadurch ist es möglich, die einzelnen Module mit einer geringen Wandstärke zu fertigen, was vor allem bei den Fingermodulen wichtig ist. Das Exoskelett wiegt mit Motoren und Elektronik ungefähr 400 Gramm - das Handmodul wiegt ca. 80 Gramm. Damit ist es sehr leicht, gleichzeitig stabil und damit tragbar.
Ein nächster Schritt im Projekt wird die Steuerung des Hand-Exoskeletts sein, wie Jonathan Eckstein erklärt. Derzeit ist das Modul als eigenständiges, am Unterarm tragbares Gerät mit EMG- und Abstandssensoren verbunden, um zunächst die elektromechanische Funktionalität des Exoskeletts zu evaluieren. Eckstein: „Das Exoskelett soll in der kommenden Entwicklungsphase zusätzlich mit Hirnströmen gesteuert werden, die beispielsweise mit Augenbewegungen kombiniert werden.“ Dies erforschen die Projektpartner der Uniklinik Tübingen und der Universität Tübingen, während die Wissenschaftler der Hochschule Reutlingen an der 3D-Objekterkennung arbeiten, um alltägliche Gegenstände erkennen zu können und das Handexoskelett entsprechend des benötigten Griffmodus voreinzustellen.
Die Erfindung ist im Rahmen des Projektes „KONSENS NHE“ (Neurorobotik) entstanden. Dieses von der Baden-Württemberg Stiftung geförderte
Forschungsprojekt unter der Leitung von Dr. med. Surjo Soekadar hat zum Ziel, ein Hand-Exoskelett für Schlaganfallpatienten zu entwickeln. Bereits seit April 2017 arbeiten Wissenschaftler der Universitätsklinik Tübingen, der Universitäten Tübingen und Stuttgart sowie der Hochschule Reutlingen zusammen. Langfristiges Ziel des Projekts ist, dass Patienten das System selbstständig im Alltag nutzen können. Die Wissenschaftler forschen zu den einzelnen Projektbausteinen Neurotechnologie, Mechatronik, Sensortechnik und -steuerung, Machine Learning sowie 3D-Objekterkennung und bauen auf den Erfahrungen auf, die bereits im Jahr 2016 mit einem Prototyp eines hirngesteuerten Exoskeletts gemacht wurden.
Die Erfindung wurde patentrechtlich geschützt. Das deutsche Patent wurde erteilt. Die Technologie-Lizenz-Büro (TLB) GmbH unterstützt die Universität Stuttgart und die Baden-Württemberg Stiftung bei der Patentierung und Vermarktung der Innovation. TLB ist im Auftrag der Universität mit der weltweiten wirtschaftlichen Umsetzung dieser zukunftsweisenden Technologie beauftragt und bietet Unternehmen Möglichkeiten der Zusammenarbeit und Lizenzierung der Schutzrechte.
Kontakt:
Experte: jonathan.eckstein@iff.uni-stuttgart.de
Presse: birgit.spaeth@iff.uni-stuttgart.de
Patentverwertung: asiller@tlb.de
Mit einem am IFF neu entwickelten Hand-Exoskelett können Patienten ihre gelähmte Hand wieder bewegen. Das von der Baden-Württemberg Stiftung unterstützte Projekt von Jonathan Eckstein wird nach der Patenterteilung im Dezember 2018 nun von der Technologie-Lizenz Büro GmbH in Karlsruhe vermarktet.
Text: Annette Siller, TLB Karlsruhe
Greifen, Halten, Öffnen und Schließen – die Funktionen einer menschlichen Hand sind ein komplexes Zusammenspiel aus Muskeln, Knochen und Nervenfasern. Durch Erkrankungen wie Muskelschwäche, Spastik oder motorische Defizite kann die Funktionalität der Hand gestört sein. An der Universität Stuttgart wurde nun ein Hand-Exoskelett entwickelt, mit welchem die Greif-Fähigkeit einer gelähmten Hand wiederhergestellt werden kann.
Nach Hirn- oder Rückenmarksverletzungen können Beeinträchtigungen wie Verlust der Muskelkraft, Apraxien oder Ataxien, Spastik oder Lähmungen der Hand auftreten. Durch die Einschränkungen im beruflichen und privaten Bereich ist dies für die Betroffenen ein großer Verlust an Lebensqualität.
Forscher des Instituts für Industrielle Fertigung und Fabrikbetrieb (IFF) der Universität Stuttgart haben nun ein Hand-Exoskelett entwickelt, das aus einem zentralen Montagemodul sowie einzelnen, beweglichen Fingermodulen besteht. Im Vergleich zu bereits bestehenden Hand-Exoskeletten hat das in Stuttgart entwickelte Modell entscheidende Vorteile: Zum einen können die Module individuell für jeden Patienten ausgestaltet und vor allem die Fingermodule sehr flexibel gestaltet werden. Damit erhält der Patient auch die Möglichkeit, seine Hand zu spreizen und seitlich zu bewegen und einzelne Finger zu bewegen.
Zum anderen ist durch diese Art der Ausgestaltung das Exoskelett leichter zu handhaben und die Patienten können es selbstständig anlegen. Durch das offene Schalensystem können die Patienten sich die Module einzeln an die Hand anstecken, wie Erfinder Jonathan Eckstein erläutert, der als wissenschaftlicher Mitarbeiter im Bereich Antriebssysteme und Exoskelette am IFF arbeitet. Die einzelnen Module werden angesteckt und können dann per Motor gestreckt oder gebeugt werden.
Das neu entwickelte Hand-Exoskelett wird aus einem speziellen Kunststoff hergestellt. Dadurch ist es möglich, die einzelnen Module mit einer geringen Wandstärke zu fertigen, was vor allem bei den Fingermodulen wichtig ist. Das Exoskelett wiegt mit Motoren und Elektronik ungefähr 400 Gramm - das Handmodul wiegt ca. 80 Gramm. Damit ist es sehr leicht, gleichzeitig stabil und damit tragbar.
Ein nächster Schritt im Projekt wird die Steuerung des Hand-Exoskeletts sein, wie Jonathan Eckstein erklärt. Derzeit ist das Modul als eigenständiges, am Unterarm tragbares Gerät mit EMG- und Abstandssensoren verbunden, um zunächst die elektromechanische Funktionalität des Exoskeletts zu evaluieren. Eckstein: „Das Exoskelett soll in der kommenden Entwicklungsphase zusätzlich mit Hirnströmen gesteuert werden, die beispielsweise mit Augenbewegungen kombiniert werden.“ Dies erforschen die Projektpartner der Uniklinik Tübingen und der Universität Tübingen, während die Wissenschaftler der Hochschule Reutlingen an der 3D-Objekterkennung arbeiten, um alltägliche Gegenstände erkennen zu können und das Handexoskelett entsprechend des benötigten Griffmodus voreinzustellen.
Die Erfindung ist im Rahmen des Projektes „KONSENS NHE“ (Neurorobotik) entstanden. Dieses von der Baden-Württemberg Stiftung geförderte
Forschungsprojekt unter der Leitung von Dr. med. Surjo Soekadar hat zum Ziel, ein Hand-Exoskelett für Schlaganfallpatienten zu entwickeln. Bereits seit April 2017 arbeiten Wissenschaftler der Universitätsklinik Tübingen, der Universitäten Tübingen und Stuttgart sowie der Hochschule Reutlingen zusammen. Langfristiges Ziel des Projekts ist, dass Patienten das System selbstständig im Alltag nutzen können. Die Wissenschaftler forschen zu den einzelnen Projektbausteinen Neurotechnologie, Mechatronik, Sensortechnik und -steuerung, Machine Learning sowie 3D-Objekterkennung und bauen auf den Erfahrungen auf, die bereits im Jahr 2016 mit einem Prototyp eines hirngesteuerten Exoskeletts gemacht wurden.
Die Erfindung wurde patentrechtlich geschützt. Das deutsche Patent wurde erteilt. Die Technologie-Lizenz-Büro (TLB) GmbH unterstützt die Universität Stuttgart und die Baden-Württemberg Stiftung bei der Patentierung und Vermarktung der Innovation. TLB ist im Auftrag der Universität mit der weltweiten wirtschaftlichen Umsetzung dieser zukunftsweisenden Technologie beauftragt und bietet Unternehmen Möglichkeiten der Zusammenarbeit und Lizenzierung der Schutzrechte.
Kontakt:
Experte: jonathan.eckstein@iff.uni-stuttgart.de
Presse: birgit.spaeth@iff.uni-stuttgart.de
Patentverwertung: asiller@tlb.de