Wir steuern Zukunft
Fortschritte in der Robotik: Seilroboter für Palettenhandling
Wir freuen uns, Ihnen spannende Einblicke in die neuesten Entwicklungen der Robotik am ISW Universität Stuttgart zu geben. Seit über einem Jahrzehnt widmen wir uns intensiv der Forschung und Weiterentwicklung von Seilrobotern, die sich als äußerst vielseitige Werkzeuge für eine Reihe von Anwendungen erwiesen haben.
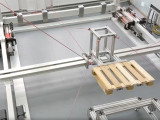
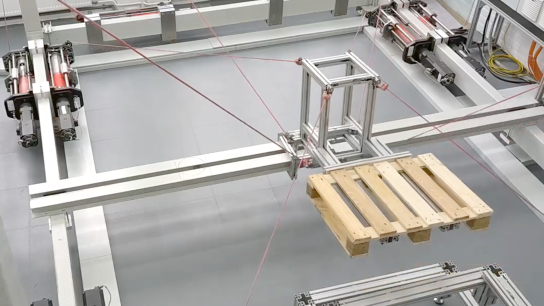
Ein herausragendes Beispiel unserer Arbeit ist der Einsatz von Seilrobotern im Bereich des Palettenhandlings. Traditionelle Roboter verwenden oft starre Verbindungen und Gelenke, um Bewegungen zu steuern. Unsere Seilroboter hingegen nutzen Seile als Antriebselemente, was uns erlaubt, flexiblere und effizientere Bewegungen zu realisieren.
Die Besonderheit der Seilrobotik liegt in der präzisen Steuerung der Seillängen und -spannungen. Dies ermöglicht es uns, Paletten sicher zu greifen, zu heben, zu transportieren und abzulegen. Allerdings bringen Seile auch Nichtlinearitäten mit sich, die die Bewegungskontrolle erschweren. Deshalb haben wir eine echtzeitfähige Verspannungsregelung entwickelt, die diese Effekte kompensiert und die Genauigkeit der Bewegungen optimiert.
Unser Versuchsstand umfasst vollständig industrielle Komponenten und Steuerungstechnik von Beckhoff Automation und Bosch Rexroth, einschließlich CNC-Funktionalitäten. Durch diese hochmoderne Ausstattung können wir unsere Forschung in einer realistischen Umgebung durchführen und innovative Lösungen für reale Anwendungen entwickeln.
Wir laden Sie herzlich ein, sich unsere Videos anzusehen, die weitere Einblicke in unsere Arbeit bieten:
https://lnkd.in/e9CNuEw6
https://lnkd.in/eR38TQ4w
https://lnkd.in/eb6jYvBv
https://lnkd.in/equ9CAdn
Was sind Seilroboter?
Wie funktionieren Seilroboter?
Wie funktioniert die Verspannungsregelung?
Für weitere Informationen und Austausch stehen Ihnen Alexander Verl, Thomas Reichenbach und Johannes Clar gerne zur Verfügung.
Wir sind begeistert von den Möglichkeiten, die Seilroboter bieten, und freuen uns darauf, diese Technologie weiter voranzutreiben und gemeinsam mit Ihnen die Zukunft der Robotik zu gestalten.
Wir freuen uns, Ihnen spannende Einblicke in die neuesten Entwicklungen der Robotik am ISW Universität Stuttgart zu geben. Seit über einem Jahrzehnt widmen wir uns intensiv der Forschung und Weiterentwicklung von Seilrobotern, die sich als äußerst vielseitige Werkzeuge für eine Reihe von Anwendungen erwiesen haben.
Ein herausragendes Beispiel unserer Arbeit ist der Einsatz von Seilrobotern im Bereich des Palettenhandlings. Traditionelle Roboter verwenden oft starre Verbindungen und Gelenke, um Bewegungen zu steuern. Unsere Seilroboter hingegen nutzen Seile als Antriebselemente, was uns erlaubt, flexiblere und effizientere Bewegungen zu realisieren.
Die Besonderheit der Seilrobotik liegt in der präzisen Steuerung der Seillängen und -spannungen. Dies ermöglicht es uns, Paletten sicher zu greifen, zu heben, zu transportieren und abzulegen. Allerdings bringen Seile auch Nichtlinearitäten mit sich, die die Bewegungskontrolle erschweren. Deshalb haben wir eine echtzeitfähige Verspannungsregelung entwickelt, die diese Effekte kompensiert und die Genauigkeit der Bewegungen optimiert.
Unser Versuchsstand umfasst vollständig industrielle Komponenten und Steuerungstechnik von Beckhoff Automation und Bosch Rexroth, einschließlich CNC-Funktionalitäten. Durch diese hochmoderne Ausstattung können wir unsere Forschung in einer realistischen Umgebung durchführen und innovative Lösungen für reale Anwendungen entwickeln.
Wir laden Sie herzlich ein, sich unsere Videos anzusehen, die weitere Einblicke in unsere Arbeit bieten:
https://lnkd.in/e9CNuEw6
https://lnkd.in/eR38TQ4w
https://lnkd.in/eb6jYvBv
https://lnkd.in/equ9CAdn
Was sind Seilroboter?
Wie funktionieren Seilroboter?
Wie funktioniert die Verspannungsregelung?
Für weitere Informationen und Austausch stehen Ihnen Alexander Verl, Thomas Reichenbach und Johannes Clar gerne zur Verfügung.
Wir sind begeistert von den Möglichkeiten, die Seilroboter bieten, und freuen uns darauf, diese Technologie weiter voranzutreiben und gemeinsam mit Ihnen die Zukunft der Robotik zu gestalten.