Wir steuern Zukunft
Industrieroboter für die hybride Fertigung
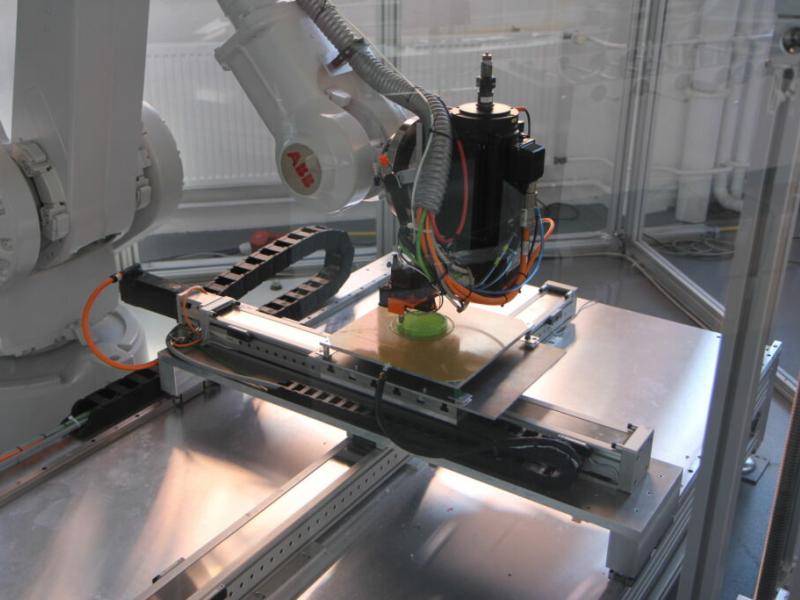
Das Potenzial zur Flexibilität in der Anwendung von Industrierobotern wird aufgrund der eingeschränkten Anpassbarkeit der Steuerung noch selten ausgeschöpft. Am Institut für Steuerungstechnik der Werkzeugmaschinen und Fertigungseinrichtungen wird der Trend zur softwaredefinierten Fertigung verfolgt, bei der die Steuerung des Produktivsystems schnell auf neue Anforderungen angepasst werden kann. Am Beispiel eines modifizierten Industrieroboters mit offener Steuerungsarchitektur wird dort die Fähigkeit zur wandlungsfähigen Fertigung erforscht.
Hier geht's direkt zum vollständigen Beitrag von Valentin Kamm vom ISW Universität Stuttgart:
https://lnkd.in/eYb7YqXz
Das Potenzial zur Flexibilität in der Anwendung von Industrierobotern wird aufgrund der eingeschränkten Anpassbarkeit der Steuerung noch selten ausgeschöpft. Am Institut für Steuerungstechnik der Werkzeugmaschinen und Fertigungseinrichtungen wird der Trend zur softwaredefinierten Fertigung verfolgt, bei der die Steuerung des Produktivsystems schnell auf neue Anforderungen angepasst werden kann. Am Beispiel eines modifizierten Industrieroboters mit offener Steuerungsarchitektur wird dort die Fähigkeit zur wandlungsfähigen Fertigung erforscht.
Hier geht's direkt zum vollständigen Beitrag von Valentin Kamm vom ISW Universität Stuttgart:
https://lnkd.in/eYb7YqXz