


Aktive Schwingungsdämpfung eines Zerspanroboters mit Hybridantrieb
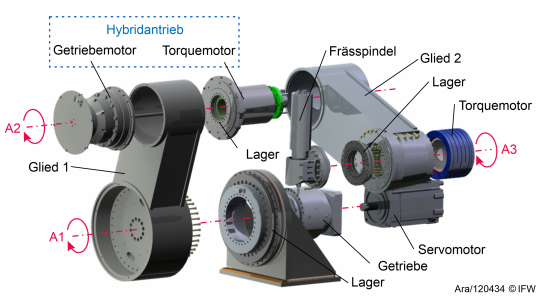
Roboter, die in der Zerspannung eingesetzt werden, benötigen im Vergleich zu konventionellen Industrierobotern eine höhere Steifigkeit. Bei der Konstruktion des Innoflex-Roboters am IFW wurde die Steifigkeit durch den Einsatz von WITTENSTEIN Galaxie®-Antrieben erhöht. Der Roboter ist mit drei Drehachsen und einer linearen Achse ausgestattet. Ein wesentliches Element der Roboterkinematik ist die zweite rotatorische Achse, die durch ein hybrides Antriebskonzept aus Getriebe- und Torquemotor aktiv versteift wird. Diese Kombination steigert die statische Steifigkeit im Vergleich zu konventionellen Antrieben um den Faktor zehn. Der Torquemotor dient der aktiven Versteifung der Achse und der Ausregelung von Gelenkwinkelfehlern bei höheren Frequenzen. Die dritte Achse mit Direktantrieb ermöglicht eine hohe Achsdynamik am TCP, führt jedoch zu Schwingungen in der Roboterstruktur. In bisherigen Arbeiten wurde dies nicht berücksichtigt, da keine aktive Kompensation von Strukturschwingungen implementiert wurde. Darüber hinaus wurde das posenabhängige Schwingungsverhalten der Roboterstruktur bisher nicht berücksichtigt. Einzelne Schwingungsmoden können entsprechend nicht gezielt gedämpft werden.
Im Rahmen des Forschungsprojekts „Aktive Schwingungsdämpfung eines Zerspanroboters mit Hybridantrieb“ wird nun eine modellbasierte Regelungsmethode zur aktiven Schwingungsdämpfung (ASD) der Roboterstruktur entwickelt. Das nichtlineare, posenabhängige und somit zeitvariante Schwingungsverhalten stellt die zentrale Herausforderung der ASD von Zerspanungsrobotern dar.
Der Regelungsansatz für den Hybridantrieb basiert auf einem echtzeitfähigen Mehrkörpermodell. Dies ermöglicht eine präzise Regelung der variierenden Schwingungsmoden und der sich ändernden Systemeigenschaften der Roboterstruktur. Die von der Roboterpose im Arbeitsraum abhängige dynamische Steifigkeit des Roboters kann somit effektiv berücksichtigt werden. Während des Zerspanprozesses wirken dynamische Kräfte auf den Roboter, die zu Schwingungen und damit zu Posenabweichungen führen. Ziel der modellbasierten Regelung des Hybridantriebs ist es, diese Abweichungen aktiv zu reduzieren, um die Oberflächenqualität des bearbeiteten Bauteils zu verbessern. Um Parameterunsicherheiten aus der Modellbildung zu kompensieren werden robuste Regelungsansätze untersucht.
Die Regelung des Hybridantriebs besteht aus zwei Reglern: dem Starrkörperregler für den Achsantrieb durch den Getriebemotor und einem Schwingungsregler für den Torquemotor. Da der Torquemotor im Kraftfluss mit dem Getriebemotor steht, kommt es zu einer Wechselwirkung zwischen beiden Antrieben, die sich auf den jeweiligen Regelkreis auswirkt. Daher stellt die Untersuchung der Kopplung beider Regelkreise einen wichtigen Aspekt dieses Forschungsprojekts dar.
Für weitere Informationen steht Ihnen Herr Mohamed Taha Araoud, Institut für Fertigungstechnik und Werkzeugmaschinen der Leibniz Universität Hannover, unter Telefon +49 (0) 511 762 18340 oder per E-Mail (araoud@ifw.uni-hannover.de) gern zur Verfügung.
Roboter, die in der Zerspannung eingesetzt werden, benötigen im Vergleich zu konventionellen Industrierobotern eine höhere Steifigkeit. Bei der Konstruktion des Innoflex-Roboters am IFW wurde die Steifigkeit durch den Einsatz von WITTENSTEIN Galaxie®-Antrieben erhöht. Der Roboter ist mit drei Drehachsen und einer linearen Achse ausgestattet. Ein wesentliches Element der Roboterkinematik ist die zweite rotatorische Achse, die durch ein hybrides Antriebskonzept aus Getriebe- und Torquemotor aktiv versteift wird. Diese Kombination steigert die statische Steifigkeit im Vergleich zu konventionellen Antrieben um den Faktor zehn. Der Torquemotor dient der aktiven Versteifung der Achse und der Ausregelung von Gelenkwinkelfehlern bei höheren Frequenzen. Die dritte Achse mit Direktantrieb ermöglicht eine hohe Achsdynamik am TCP, führt jedoch zu Schwingungen in der Roboterstruktur. In bisherigen Arbeiten wurde dies nicht berücksichtigt, da keine aktive Kompensation von Strukturschwingungen implementiert wurde. Darüber hinaus wurde das posenabhängige Schwingungsverhalten der Roboterstruktur bisher nicht berücksichtigt. Einzelne Schwingungsmoden können entsprechend nicht gezielt gedämpft werden.
Im Rahmen des Forschungsprojekts „Aktive Schwingungsdämpfung eines Zerspanroboters mit Hybridantrieb“ wird nun eine modellbasierte Regelungsmethode zur aktiven Schwingungsdämpfung (ASD) der Roboterstruktur entwickelt. Das nichtlineare, posenabhängige und somit zeitvariante Schwingungsverhalten stellt die zentrale Herausforderung der ASD von Zerspanungsrobotern dar.
Der Regelungsansatz für den Hybridantrieb basiert auf einem echtzeitfähigen Mehrkörpermodell. Dies ermöglicht eine präzise Regelung der variierenden Schwingungsmoden und der sich ändernden Systemeigenschaften der Roboterstruktur. Die von der Roboterpose im Arbeitsraum abhängige dynamische Steifigkeit des Roboters kann somit effektiv berücksichtigt werden. Während des Zerspanprozesses wirken dynamische Kräfte auf den Roboter, die zu Schwingungen und damit zu Posenabweichungen führen. Ziel der modellbasierten Regelung des Hybridantriebs ist es, diese Abweichungen aktiv zu reduzieren, um die Oberflächenqualität des bearbeiteten Bauteils zu verbessern. Um Parameterunsicherheiten aus der Modellbildung zu kompensieren werden robuste Regelungsansätze untersucht.
Die Regelung des Hybridantriebs besteht aus zwei Reglern: dem Starrkörperregler für den Achsantrieb durch den Getriebemotor und einem Schwingungsregler für den Torquemotor. Da der Torquemotor im Kraftfluss mit dem Getriebemotor steht, kommt es zu einer Wechselwirkung zwischen beiden Antrieben, die sich auf den jeweiligen Regelkreis auswirkt. Daher stellt die Untersuchung der Kopplung beider Regelkreise einen wichtigen Aspekt dieses Forschungsprojekts dar.
Für weitere Informationen steht Ihnen Herr Mohamed Taha Araoud, Institut für Fertigungstechnik und Werkzeugmaschinen der Leibniz Universität Hannover, unter Telefon +49 (0) 511 762 18340 oder per E-Mail (araoud@ifw.uni-hannover.de) gern zur Verfügung.